ScorBot ER-4U Educational Robot
The ScorBot ER-4U Educational Robot is a versatile and reliable system for industrial robotics training and education. The ScorBot ER-4U robot arm can be mounted on a tabletop, pedestal or linear slidebase.
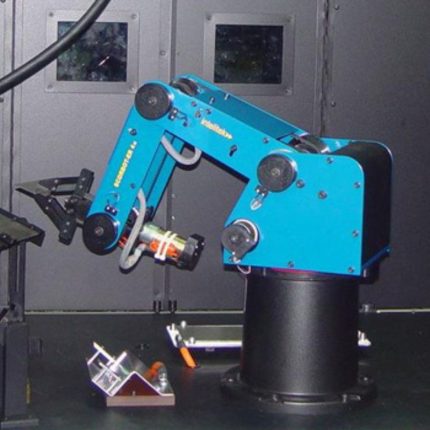
The ScorBot ER-4U Educational Robot is a versatile and reliable system for industrial robotics training and education. The ScorBot ER-4U robot arm can be mounted on a tabletop, pedestal or linear slidebase. The robot’s speed and repeatability make it highly suited for both stand-alone operations and integrated use in automated workcell applications such as robotic welding, machine vision, CNC machine tending and other FMS operations The robot is supported by ScorBase robotics programming and control software. Optional RoboCell 3D graphic software lets students design, create and control simulated industrial workcells, and provides dynamic simulation of the robot and workcell devices during position teaching and program execution. The robot is designed to enable observation of its working mechanical parts while ensuring a safe environment for students.
Standard features
-
- Mechanical arm
- USB Controller
- USB communication cable
- Software CD
- Plastic dust covers
- Documentation for all software and hardware components
- Certified for CE safety compliance.
Example Applications
-
- ER 4U with Machine Tending (Milling/Turning/Laser Engraver)
- ER 4U with SkillsUSA materials handling package (RAT – Robotic Automation Technology)
- ER 4U with ASRS (Automated Storage and Retrieval System)
- ER 4U with machine vision system from Cognex for Quality Control
Controller Specifications
USB Controller
Mechanical Specifications
Axes Specifications
| Mechanical structure | Vertically articulated | ||
| Weight | 10.8 kg | 23.8 lb | |
| Operating radius | 610 mm | 24″ | |
| Maximum Payload | |||
| With reduced acceleration: | 2.5 Kg | 5.5 lbs | |
| Full speed: | 1 Kg | 2.2 lbs | |
| End Effectors | DC servo gripper, with optical encoder, parallel finger motion Measurement of object’s size by means of Gripper sensor and software. |
||
| Max. gripper opening | |||
| Without pads | 75 mm | 3″ | |
| With pads | 65 mm | 2.6″ | |
| Repeatability at TCP (tip of gripper) |
± 0.18 mm | 0.007″ | |
| Position Feedback | Optical encoders on each axis | ||
| Homing | Fixed position on each axis found by means of micro switches | ||
| Actuators | 12 VDC servo motors | ||
| Transmission | Gears, timing belts, lead screw | ||
| Ambient operating temperature | 2° – 40°C | 36° – 104°F | |
| Number of Axes | 5 rotational axes and gripper | ||
| Axis Movement | Range | Effective Speed | |
| Axis 1: Base rotation | 310° | 20°/sec | |
| Axis 2: Shoulder rotation | 158° | 26.3°/sec | |
| Axis 3: Elbow rotation | 260° | 26.3°/sec | |
| Axis 4: Wrist pitch | 260° | 83°/sec | |
| Axis 5: Wrist roll | Unlimited mechanically ±570° electrically | 106°/sec | |
| Part | Description |
| 00-1710-0000 | Teach Pendant |
| 00-0609-0000 | Multipurpose Gripper Attachment for ScorBot ER-4U |
| 00-1020-0000 | Linear slide base for ScorBot ER-4U: 1 m |
| 00-1021-0000 | Linear slide base for ScorBot ER-4U: 1.8 m |
| 10-5803-000 | Linear conveyor |
| 00-1009-0000 | Rotary table |
| 00-1013-0000 | X Positioning table, single-axis |
| 00-1014-0000 | XY Positioning table, dual-axis |
| 001201: | Experiment table |
| 001209: | Photoelectric sensor for conveyor |
| 001203: | Photoelectric sensor for rotary table |
| 21-0004-0000: | Dual-axis air vise |
| 025234: | Solenoid Valve (24V) for use with dual-axis vise 21-0004-0000 |
| 025217: | Parts Feeder: Pneumatic, for rectangular parts |
| 025210: | Parts Feeder: Pneumatic, for round parts |
| 010074: | Parts Feeder: Gravity operated |
| 001110: | Palletizing Rack |
| 001249: | Workbench: Light duty extruded aluminum |
| 001251: | Workbench: 59” Long |
| 001250: | Workbench: 71” Long |
| 00-1293-0000 | Workbench with shelves: 59” Long |
| 001284: | Workbench: Robot pedestal welded |
| 001290: | Workbench: PC table |